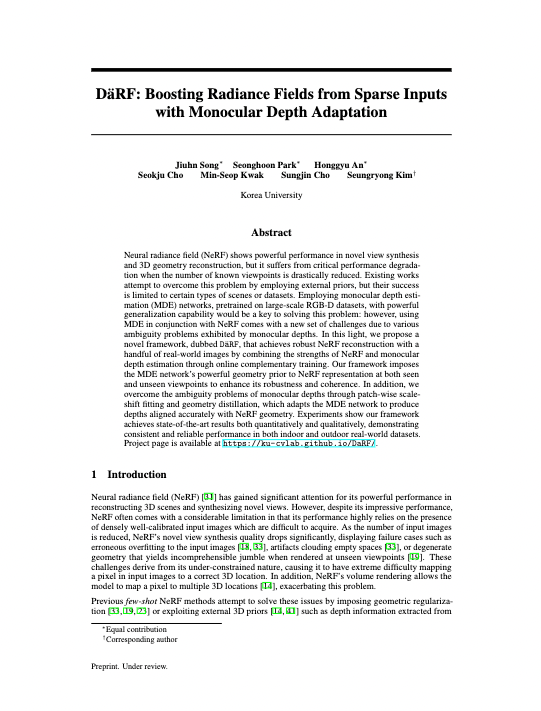
Overview
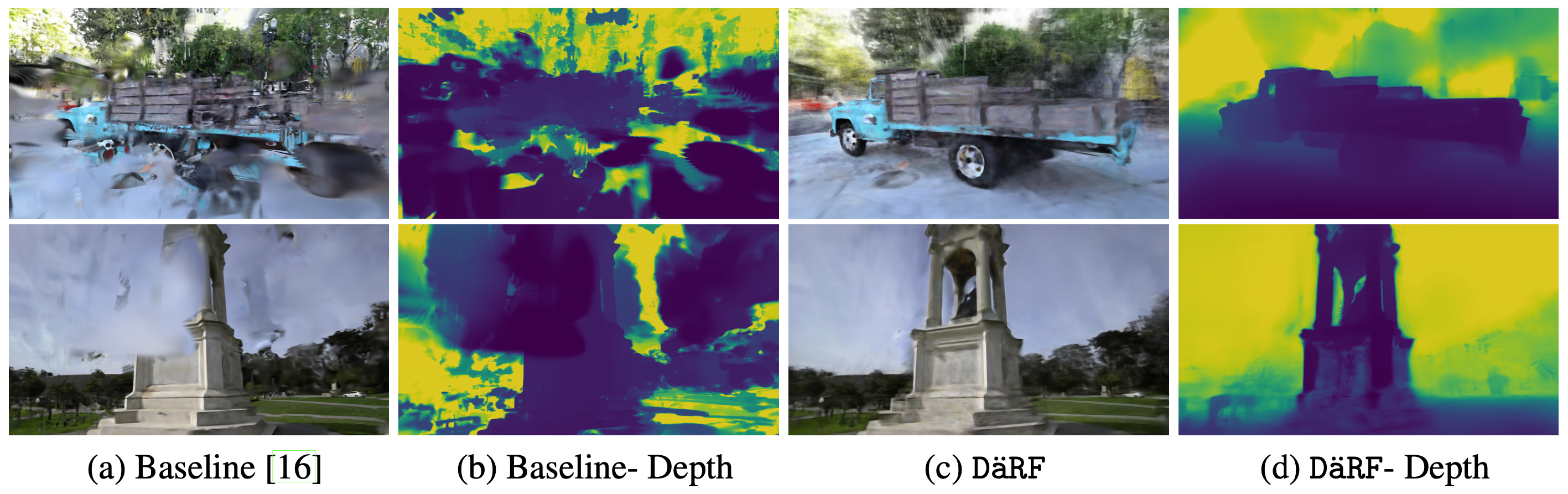
Unlike existing work (SCADE [CVPR'23]) that distills depths by pretrained MDE to NeRF at seen view only, our DäRF fully exploits the ability of MDE by jointly optimizing NeRF and MDE at a specific scene, and distilling the monocular depth prior to NeRF at both seen and unseen views.
Abstract
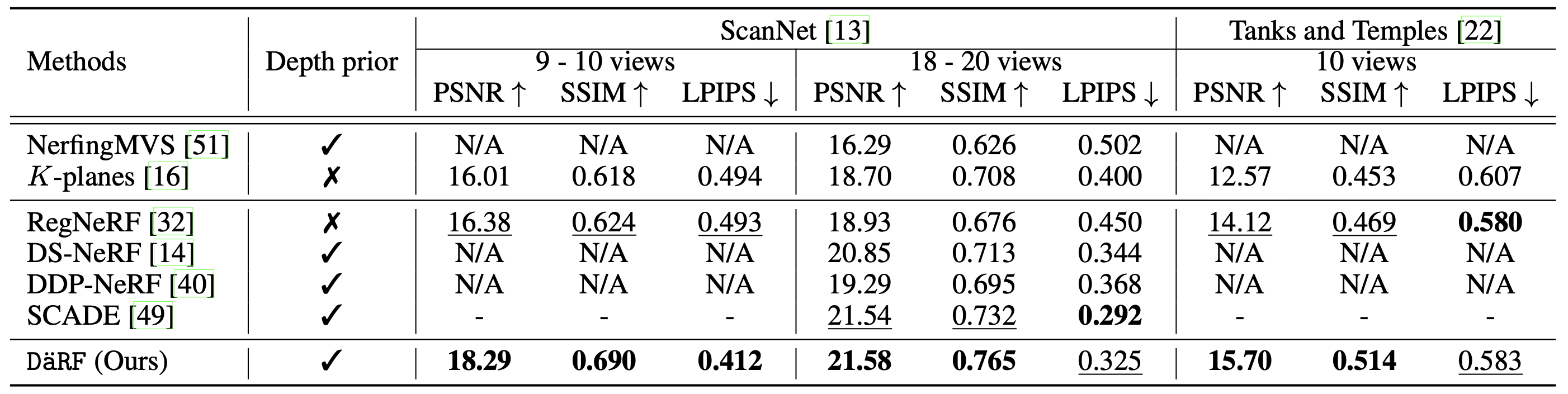
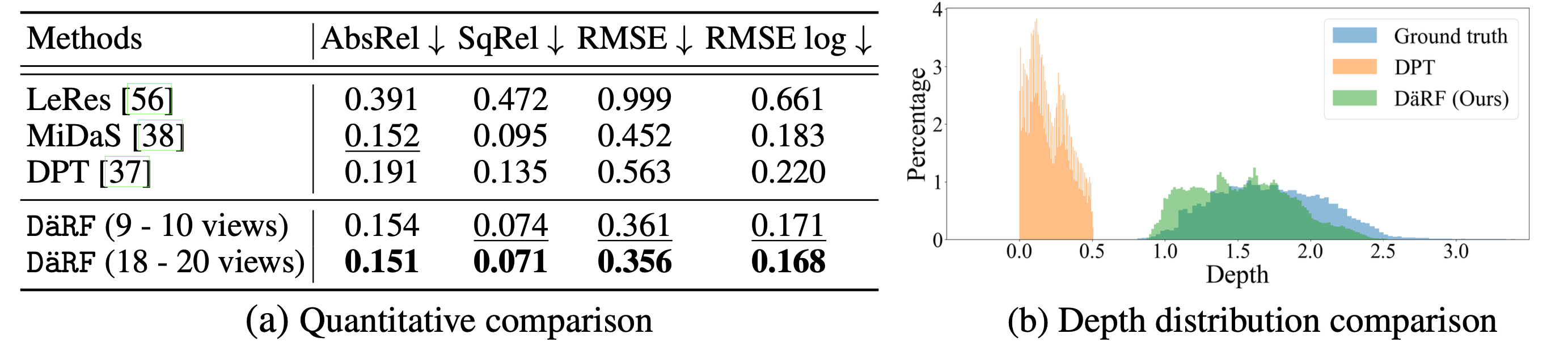
Neural radiance field (NeRF) shows powerful performance in novel view synthesis and 3D geometry reconstruction, but it suffers from critical performance degradation when the number of known viewpoints is drastically reduced. Existing works attempt to overcome this problem by employing external priors, but their success is limited to certain types of scenes or datasets. Employing monocular depth estimation (MDE) networks, pretrained on large-scale RGB-D datasets, with powerful generalization capability may be a key to solving this problem: however, using MDE in conjunction with NeRF comes with a new set of challenges due to various ambiguity problems exhibited by monocular depths. In this light, we propose a novel framework, dubbed DäRF, that achieves robust NeRF reconstruction with a handful of real-world images by combining the strengths of NeRF and monocular depth estimation through online complementary training. Our framework imposes the MDE network's powerful geometry prior to NeRF representation at both seen and unseen viewpoints to enhance its robustness and coherence. In addition, we overcome the ambiguity problems of monocular depths through patch-wise scale-shift fitting and geometry distillation, which adapts the MDE network to produce depths aligned accurately with NeRF geometry. Experiments show our framework achieves state-of-the-art results both quantitatively and qualitatively, demonstrating consistent and reliable performance in both indoor and outdoor real-world datasets.
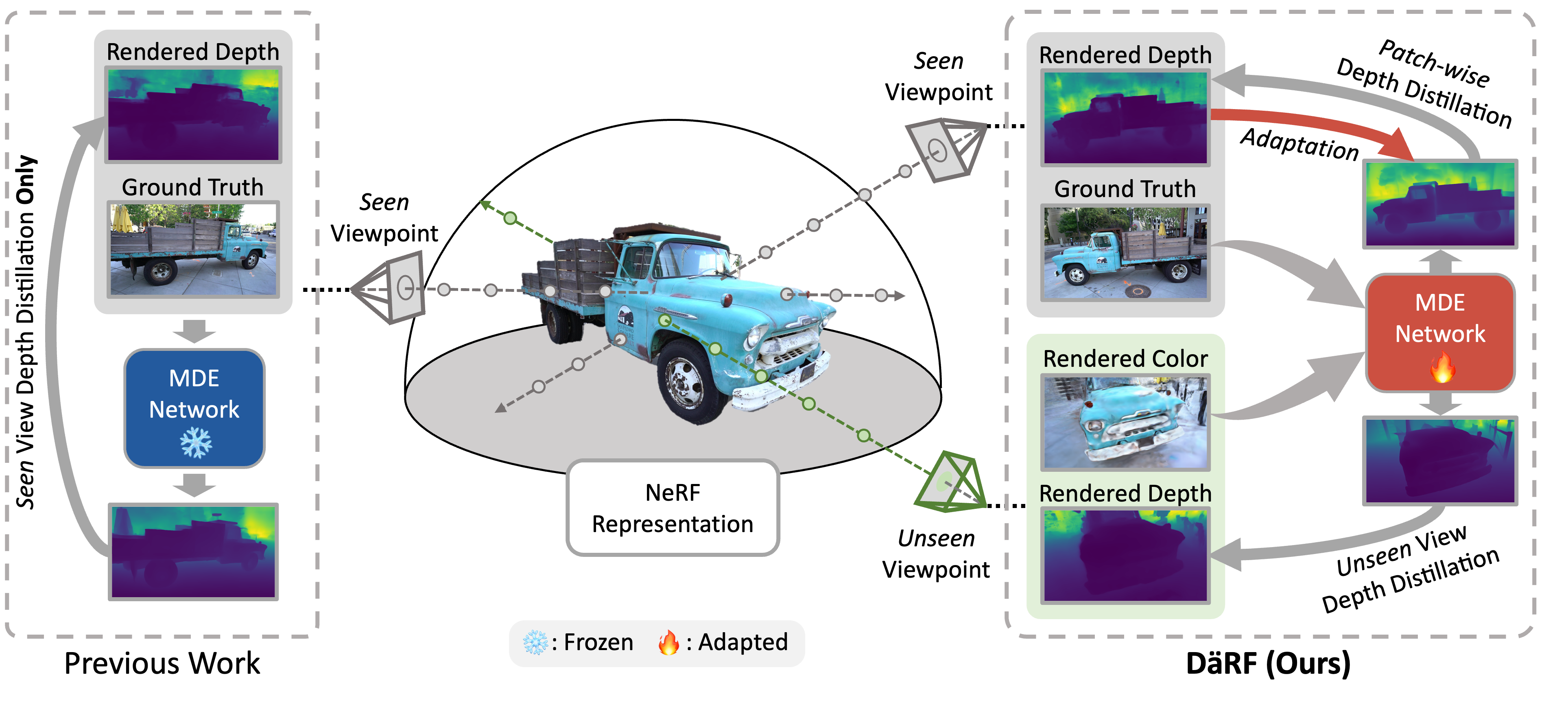
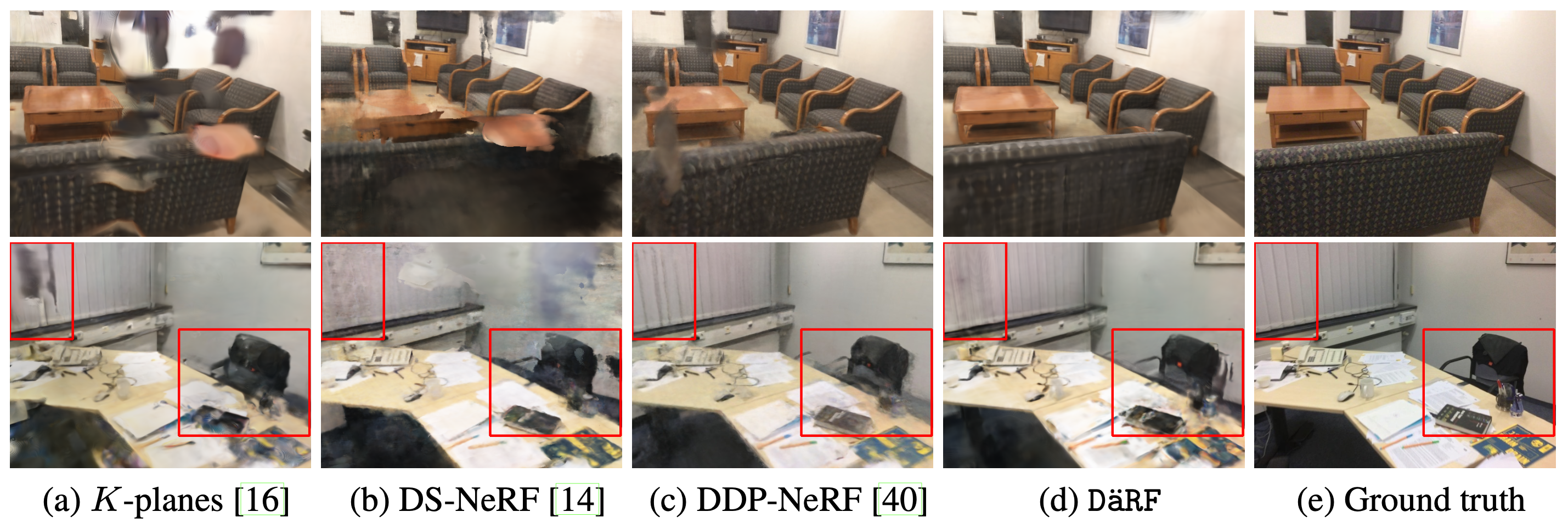
Qualitative Results
Quantitative Results
Citation
Acknowledgements
The website template was borrowed from Michaël Gharbi.